Research Overview
The Human-Robot Interaction (HRI) Lab investigates how robots can engage with humans in socially intelligent, adaptive, and meaningful ways, with a particular focus on users who require additional support, such as children with autism spectrum disorder (ASD), individuals with developmental disabilities, and older adults. Our overarching goal is to bridge the gap between innovative robotic technologies and their practical deployment in therapeutic, educational, and care contexts.
At the core of our research is a human-centered perspective: effective human–robot interaction must account for individual differences, emotional states, and real-world constraints. Rather than designing robots as generic communicators, we study how robots can perceive, interpret, and adapt to users over time, enabling sustained engagement and socially appropriate interaction.
Vision
The Human-Robot Interaction Lab aims to advance personalized social robots that understand individual users, adapt over time, and function effectively in real-world contexts. By integrating affective modeling, adaptive interaction design, innovative robot embodiments, and stakeholder co-design, the lab seeks to move social robotics beyond prototypes toward meaningful, lasting impact in therapy, education, and care.
Social Interaction and Engagement in Human–Robot Interaction

We study how robots can foster natural and engaging social interaction through both verbal and non-verbal behaviors, including gaze, proximity, movement, touch, and play-based interaction. Our work emphasizes designing robots as responsive partners that dynamically adjust interaction strategies based on user feedback, rather than static or scripted systems.
Play-based interaction is a particular focus in child–robot interaction, where playful scenarios provide a structured yet flexible medium for promoting engagement, communication, and positive affect.
Selected Recent Work & Publications
– Play-based and affect-aware interaction design for child–robot interaction
– Analysis of engagement dynamics in social and therapeutic HRI contexts
Rudovic, O., Lee, J., Dai, M., Schuller, B., & Picard, R. W. (2018). Personalized machine learning for robot perception of affect and engagement in autism therapy. Science Robotics, 3(19), eaao6760.
Modeling Individual Differences and Affective States
A central challenge in HRI is addressing large individual variability in emotional expression, sensory sensitivity, and behavioral patterns. We develop methods to model users’ affective states, engagement levels, and physiological responses, enabling robots to adapt their behavior to individual needs and preferences.
This research builds on the lab’s foundational work in personalized affect and engagement recognition using machine learning, and extends toward long-term interaction modeling that captures intra- and inter-individual differences.
Selected Recent Work & Publications
– Personalized emotion and engagement recognition in robot-assisted intervention
– Physiological signal–based modeling of affective responses and individual profiles
Lee, J., & Melo, N. (2020). Habit representation based on activity recognition. Sensors, 20(7), 1928.
Lee, J., & Bastos, N. (2020). Finding characteristics of users in sensory information: From activities to personality traits. Sensors, 20(5), 1383.
Transformable robotic hardware
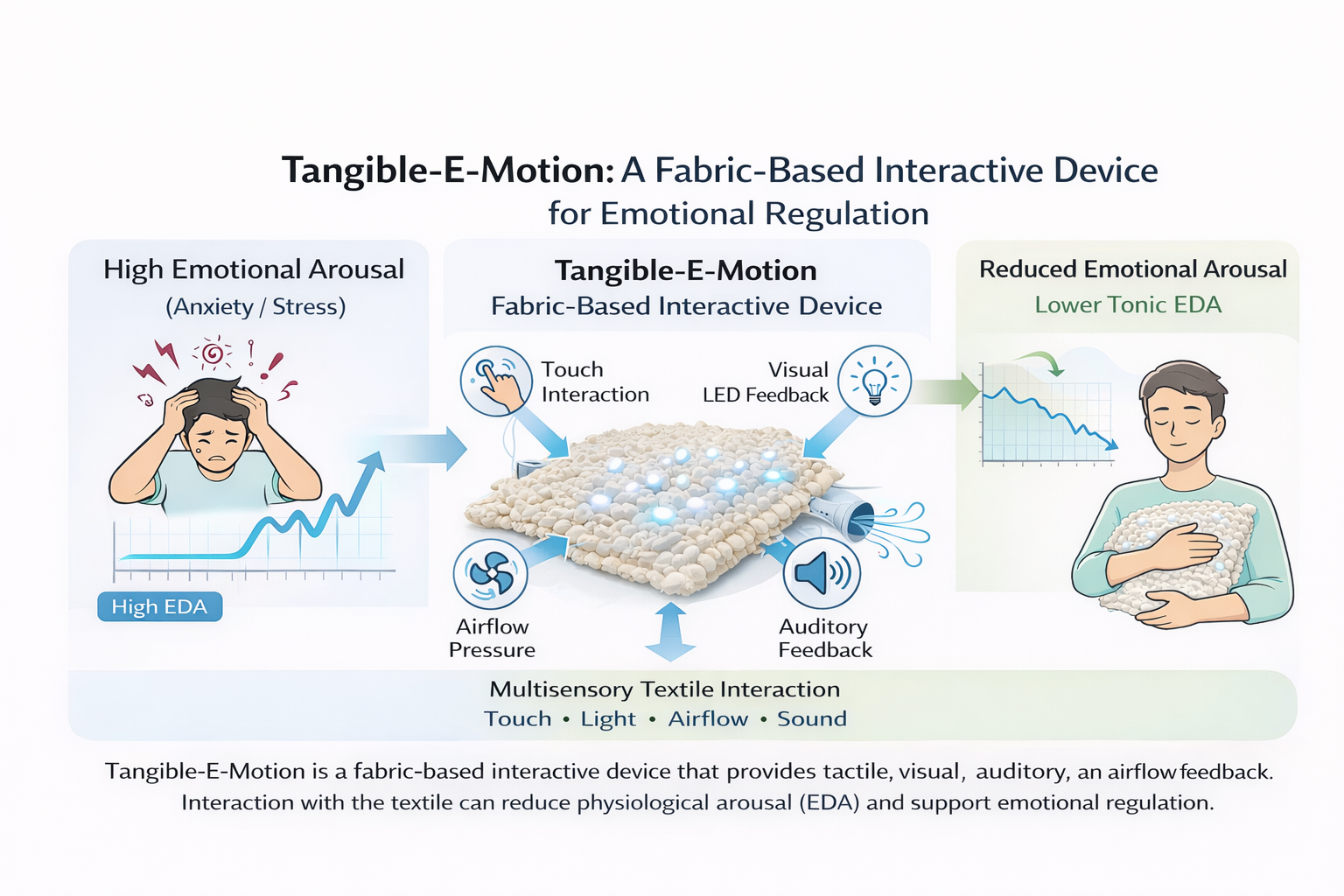
The lab explores novel robot embodiments, with a focus on fabric-based and transformable social robots. These platforms allow users to physically reshape the robot, supporting customization across contexts and personal preferences.
We investigate how tactile interaction, softness, and physical adaptability contribute to emotional regulation, comfort, and user acceptance, particularly in therapeutic and stress-sensitive environments.
Selected Recent Work & Publications
– Design and evaluation of fabric-based interactive devices for emotional support
– Tangible and tactile interaction techniques for affect regulation
Lee, J., & Jeon, E. (2026). Tangible-E-Motion: An Exploratory Multi-Study Investigation of a Fabric-Based Interactive Device for Emotional Regulation in IEEE Access.
Robot-Assisted Therapy: Co-Design, Usability, and Acceptance
To address the gap between laboratory research and real-world application, the HRI Lab emphasizes stakeholder-centered design and empirical evaluation in authentic settings. We collaborate closely with therapists, caregivers, and practitioners to co-design interaction scenarios and robot behaviors that align with clinical workflows and user needs.
Our research examines not only interaction outcomes but also acceptance, usability, trust, and perceived usefulness, which are critical for sustainable adoption of robot-assisted interventions.
Selected Recent Work & Publications
– Co-Designing Child-Robot Interaction Scenarios with Therapists for Autism Therapy (2025)
– Assessing Practitioner Acceptance in Robot-Assisted Autism Therapy: An Anticipated Usability Model (RAAT-AUM) (2025)
